I noticed a few papers up on arXiv last week that correspond to some old posts, so I thought I’d make a quick note that these people are still doing math research and maybe you are curious about it!
We last saw Federica Fanoni and Hugo Parlier when they explored kissing numbers, and they gave an upper bound on the number of systoles (shortest closed curves) that a surface with cusps can have. This time they give a lower bound on the number of curves that fill such a surface. Remember, filling means that if you cut up all the curves, you end up with a pile of disks (and disks with holes in them). So you can check out that paper here.
Last time we saw Bill Menasco, he was working with Joan Birman and Dan Margalit to show that efficient geodesics exist in the curve complex. This new paper up on arxiv was actually cited in that previous paper- it explains the software that a bunch of now-grad students put together with Menasco when they were undergrads in Buffalo, NY (UB and Buffalo State) during this incredible sounding undergrad research opportunity– looks like the grant is over, but how amazing was that- years of undergrads working for an entire year on real research with a seminar and a semester of preparation, and then getting to TA a differential equations class at the end of your undergraduate career. Wow. I’m so impressed. I got sidetracked: the software they made calculates distances in the curve complex and the paper explains the math behind it and includes lots of pretty pictures.
My friend Jeremy did a guest post about baklava and torus knots a long time ago, and of course he’s got his own wildly popular blog. He also has a bunch of publications up on arXiv, including one from this summer. They’re all listed in computer science but have a bunch of (not-pure) math in them.
The paper I worked on over that summer at Tufts with Moon Duchin, her student Andrew Sánchez (note to self: I need a good looking website I should text Andrew), my old friend Matt Cordes, and graduate student superstar Turbo Ho is up on arXiv and has been submitted: it’s on random nilpotent quotients.
Moon and Andrew and others from that summer have another paper which has been accepted to a journal, it’s also about random groups and is here. It was super cool, I saw a talk at MSRI during my graduate summer school there and John Mackay (also a coauthor on that paper) was in the audience and this result came up organically during the talk. Pretty great!
There’s another secret project from that summer which isn’t out yet, but I just checked two of the three co-authors webpages and they had three and four papers out in 2015 (!!!) That’s so many papers! So I don’t know when secret project will be out but I’ll post about it when it is.
I really enjoy posting about current research in mathematics and trying to translate it into undergrad-readability, so I’ll try to continue doing so. But this Thursday you’ll read about cinnamon buns instead. Yum.



 intersects
intersects  at most n-1 times.
at most n-1 times.
 is an efficient geodesic if all n of these geodesics are initially efficient:
is an efficient geodesic if all n of these geodesics are initially efficient:  . In this paper, Birman, Margalit, and Menasco prove that efficient geodesics always exist if
. In this paper, Birman, Margalit, and Menasco prove that efficient geodesics always exist if  have distance at least three.
have distance at least three. . Remember, if you’ve got two curves that are distance three from each other, they have to fill the surface: that means if you cut along both of them, you’ll end up with a big pile of topological disks. In this case, they take this pile and make them actual polygons with straight sides labeled by the cut curves. A bit more topology shows that you only end up with finitely many reference arcs that matter (essentially, there’s only finitely many interesting polygons, and then there are only so many ways to draw lines across a polygon).
. Remember, if you’ve got two curves that are distance three from each other, they have to fill the surface: that means if you cut along both of them, you’ll end up with a big pile of topological disks. In this case, they take this pile and make them actual polygons with straight sides labeled by the cut curves. A bit more topology shows that you only end up with finitely many reference arcs that matter (essentially, there’s only finitely many interesting polygons, and then there are only so many ways to draw lines across a polygon). many curves that can appear as the first vertex in such a geodesic, which means that there are finitely many efficient geodesics between any two vertices where they exist.
many curves that can appear as the first vertex in such a geodesic, which means that there are finitely many efficient geodesics between any two vertices where they exist.

 such that
such that  , and
, and  are disjoint.
are disjoint. . For any two curves you give me, there’ll be a minimal intersection number, by which I mean none of this squiggly nonsense:
. For any two curves you give me, there’ll be a minimal intersection number, by which I mean none of this squiggly nonsense:
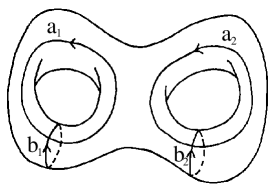
 , that means there’s a neighborhood around these curves that looks like a torus with a hole on the side:
, that means there’s a neighborhood around these curves that looks like a torus with a hole on the side:
 connects x and y, with consecutive members of our sequence disjoint. So in the curve complex, there’s a path of length two between x and y.
connects x and y, with consecutive members of our sequence disjoint. So in the curve complex, there’s a path of length two between x and y. .
. with a smaller intersection number with both x and y- by the principle of induction, there’ll be a path from c to x, and one from c to y. So x and y will be connected by a path, which is exactly what we want.
with a smaller intersection number with both x and y- by the principle of induction, there’ll be a path from c to x, and one from c to y. So x and y will be connected by a path, which is exactly what we want.



 intersect, and both are disjoint from
intersect, and both are disjoint from  , so that’s okay too.
, so that’s okay too.
{kind=link}